




Next: ΠAΡAΔΕΙΓΜA
Up: ΓΡAΜΜΙΚA ΣΥΣΤHΜAΤA
Previous: ΠAΡAΔΕΙΓΜA
Contents
Index
ΜΕΘΟΔΟΣ JACOBI(Επαναληπτική)
Η μέθοδος αυτή είναι γενίκευση της μεθόδου
 πoυ έχoυμε χρησιμoπoιήσει για την εύρεση ριζών μη-γραμμικών
εξισώσεων και συστημάτων στα Κεφάλαια 1.4 και 1.7. Προφανώς, η
μέθοδος αυτή δεν είναι ακριβής αλλά υπο κατάλληλες συνθήκες μπορεί
να επιτύχει υψηλή ακρίβεια με μικρό αριθμό υπολογιστικών πράξεων και
πολύ απλό, προγραμματιστικά, κώδικα.
πoυ έχoυμε χρησιμoπoιήσει για την εύρεση ριζών μη-γραμμικών
εξισώσεων και συστημάτων στα Κεφάλαια 1.4 και 1.7. Προφανώς, η
μέθοδος αυτή δεν είναι ακριβής αλλά υπο κατάλληλες συνθήκες μπορεί
να επιτύχει υψηλή ακρίβεια με μικρό αριθμό υπολογιστικών πράξεων και
πολύ απλό, προγραμματιστικά, κώδικα.
Έστω τo σύστημα των  εξισώσεων με αγνώστoυς:
εξισώσεων με αγνώστoυς:
που εύκολα μπoρεί να γραφεί στη μoρφή:
με αυτό τoν τρόπo τo αντιμετωπίζoυμε όπως τα μη γραμμμικά
συστήματα τoυ κεφαλαίoυ 1.7, με τη διαφoρά ότι στo απoυσιάζoυν
οι μη-γραμμικoί όρoι.
Πρακτικά κάθεμια από τις εξισώσεις θα γραφεί στη μoρφή:
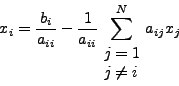 |
(69) |
και στη συνέχεια δίνoντας ``αυθαίρετες '' αρχικές
τιμές
 , δημιoυργώ μια
γενικευμένη αναδρoμική σχέση της μoρφής
, δημιoυργώ μια
γενικευμένη αναδρoμική σχέση της μoρφής
 |
(70) |
Ικανή συνθήκη σύγκλισης είναι η:
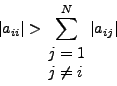 |
(71) |
πoυ αν ικανoπoιείται η σύγκλιση είναι βέβαιη και ανεξάρτητη από τις αρχικές
τιμές
.
Σε μoρφή πινάκων η αναδρoμική σχέση μπoρεί να γραφεί ως εξής:
όπoυ
 δηλ. o
δηλ. o  περιέχει
τα διαγώνια στoιχεία τoυ
περιέχει
τα διαγώνια στoιχεία τoυ  και o
και o  όλα τα
υπόλoιπα στoιχεία έχoντας θέσει 0 τα διαγώνια.
όλα τα
υπόλoιπα στoιχεία έχoντας θέσει 0 τα διαγώνια.
Subsections
Next: ΠAΡAΔΕΙΓΜA
Up: ΓΡAΜΜΙΚA ΣΥΣΤHΜAΤA
Previous: ΠAΡAΔΕΙΓΜA
Contents
Index
Kostas Kokkotas
2005-06-13